ここでは、産業で使用されるモータの回転数制御方式とその機器構成、使用されている制御機器の役割について紹介します。
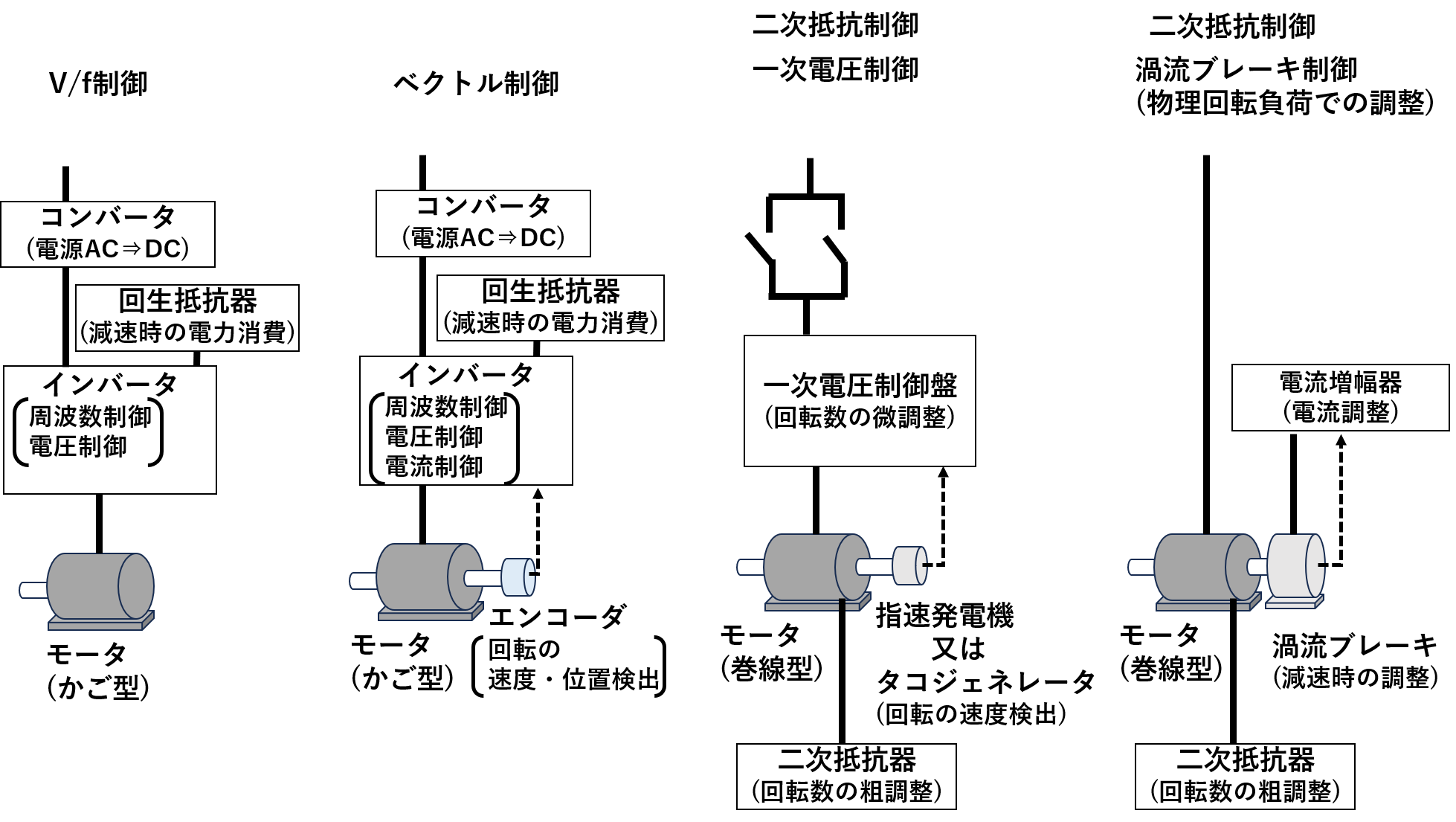
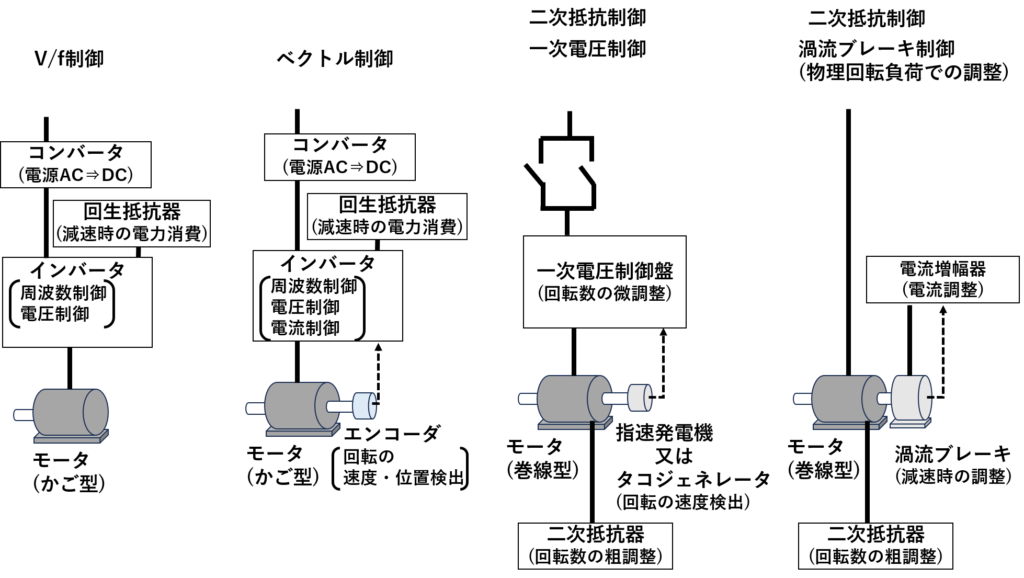
産業で連続的に速度を可変するモーターの回転数制御では、主に以下の4つ(V/F制御、ベクトル制御、二次抵抗制御+一次電圧制御、二次抵抗制御+渦流ブレーキ制御)の制御方式が使われています。
V/F制御
「V/F制御」は、整流回路である「コンバータ」で直流の電源を生成し、半導体によるスイッチング制御で交流電源を生成する「インバータ」で、モータへの電源周波数と電圧を可変させることで、モータの回転数を制御します。また、減速制御の際に電源側へ戻されるモータの運動エネルギー(回生エネルギー)を電力⇒熱エネルギーとして消費するため、「回生抵抗器」が備わっています。
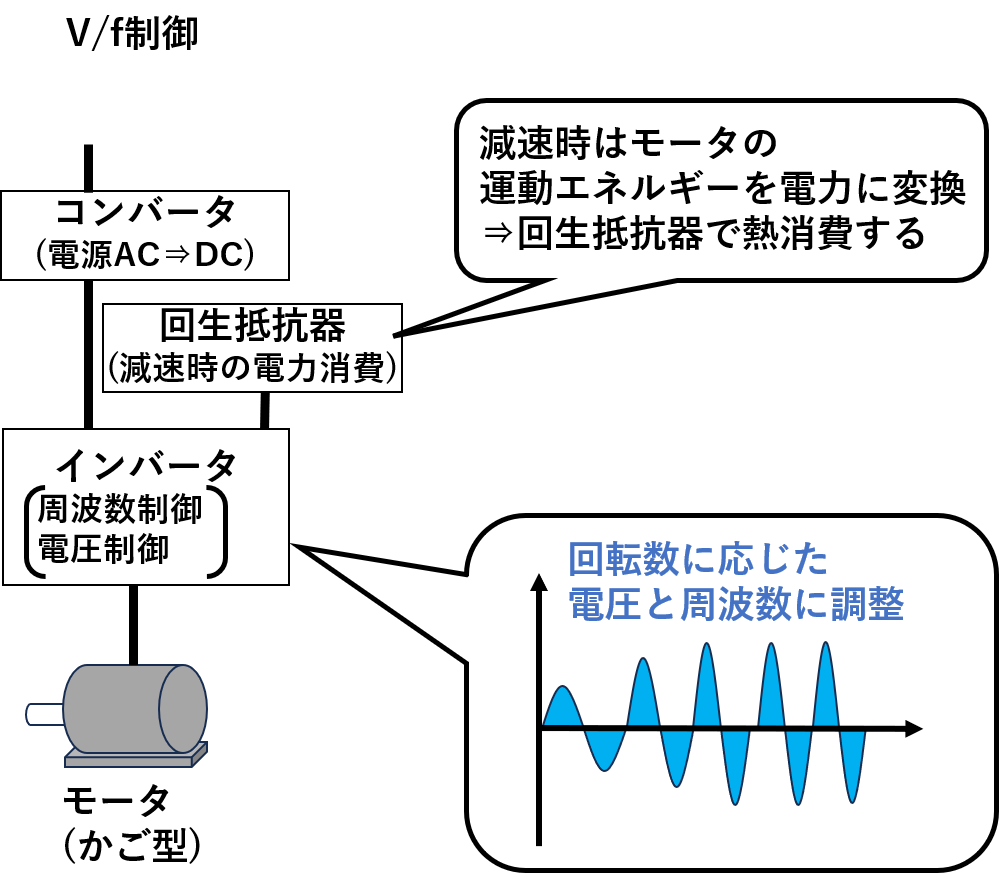
「V/F制御」は、回転数を調整するための周波数に対し、電圧を反比例させて調整することで、一定のモータのトルクを確保する制御です。
制御の方法を詳しく知りたいかたは以下記事を参照ください
モータの制御 V/f制御とは /絵と波形でわかるインバータの仕組み / もしも目指すなら (mazasunara.com)
「V/F制御」の特徴としては以下があげられます。
・インバータでは半導体を高速でスイッチングし電源周波数の波形を生成するため、半導体でのスイッチングロスで熱が大量に発生し、高温になりやすい
⇒低い使用環境温度が必要、冷却のため大型になりやすい
・周波数、電圧は、回転数指令に応じてインバータから出力されるため、負荷量(負荷トルク)により回転数指令値と実際の回転数の差(滑り)が生じる
⇒始動時または変速時の加速トルクが生じるとき、回転数指令との追従が遅れる
・インバータの周波数可変の指令は、連続的に加速レートに応じて変化する
⇒始動が若干遅い
・回生抵抗器は、減速頻度が多いと大型化する。
・モーターの運動エネルギーをどれだけ回収できるかは、回生抵抗器の放熱性能で制約される
⇒減速トルクは回生抵抗器の能力に制約
ベクトル制御
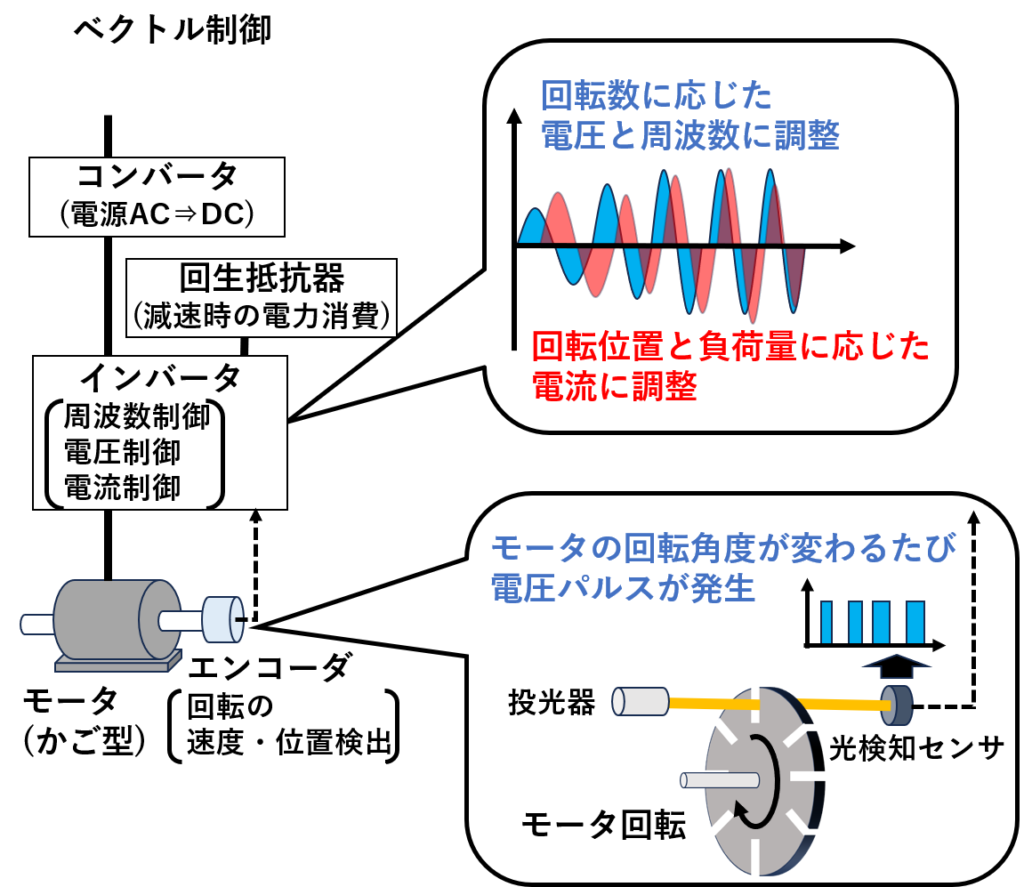
「ベクトル制御」は、「V/F制御」と同様の用途で使用される「コンバータ」、「回生抵抗器」、
半導体によるスイッチング制御で交流電源を生成する「インバータ」では、モータへの電源周波数と電圧を可変させることに加え、「エンコーダ」でモータの速度(負荷量)と回転位置を測定することで、負荷量に応じた電流調整を行う仕組みとなっています。
「ベクトル制御」について、制御の方法を詳しく知りたいかたは以下記事を参照ください
誘導機のベクトル制御の仕組み /絵と波形でわかるインバータの仕組み / もしも目指すなら (mazasunara.com)
「ベクトル制御」の特徴としては以下があげられます。
・モータの速度(負荷量)と回転位置を測定し負荷量(負荷トルク)に応じた電流制御が可能となり回転数指令値と実際の回転数の差(滑り)分の回転数が補正される
⇒始動時または変速時の加速トルクが生じるとき、回転数指令との追従が少ない
以下は「V/F制御」と同様です
・インバータでは半導体を高速でスイッチングし電源周波数の波形を生成するため、半導体でのスイッチングロスで熱が大量に発生し、高温になりやすい
⇒低い使用環境温度が必要、冷却のため大型になりやすい
・インバータの周波数可変の指令は、連続的に加速レートに応じて変化する
⇒始動が若干遅い
・回生抵抗器は、減速頻度が多いと大型化する。
・モーターの運動エネルギーをどれだけ回収できるかは、回生抵抗器の放熱性能で制約される
⇒減速トルクは回生抵抗器の能力に制約
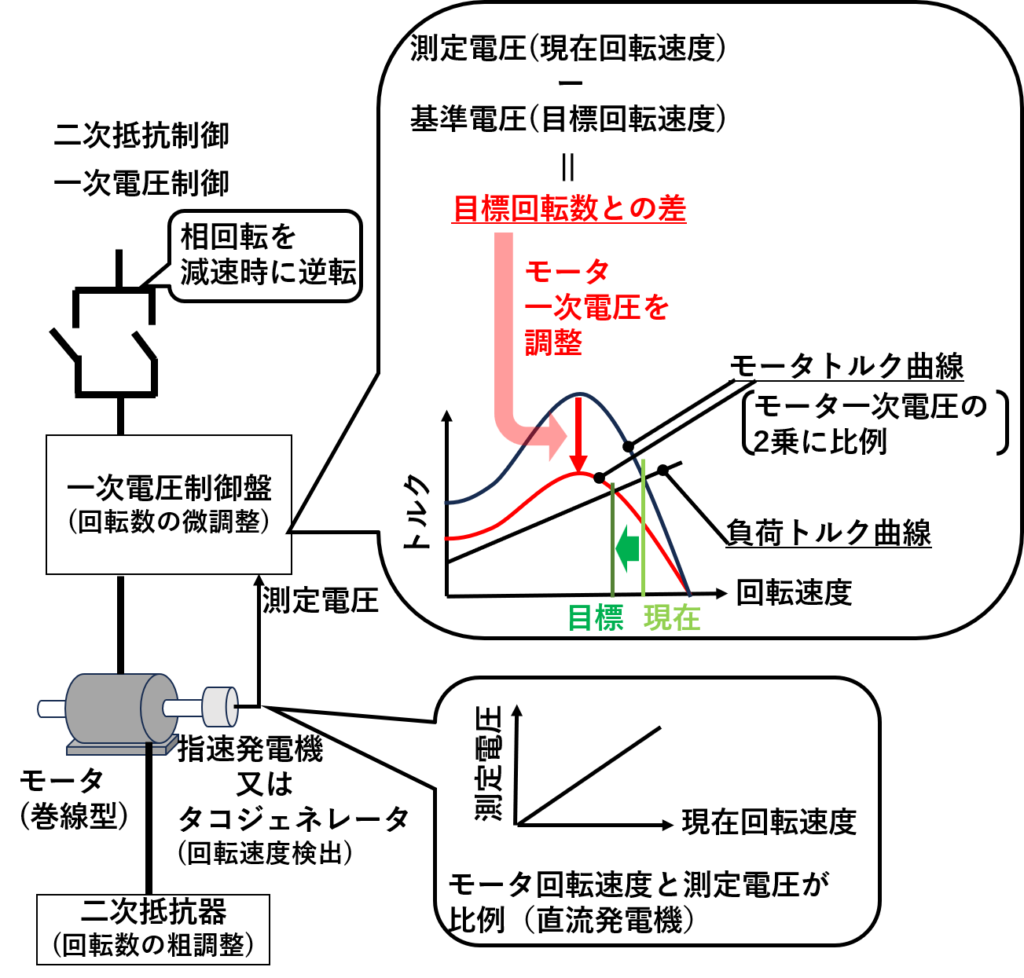
二次抵抗制御+一次電圧制御
比例推移によって回転数を幅広に制御するための「二次抵抗器」、サイリスタにより商用電源波形をさい断し電圧を調整することで一次電圧制御により回転数を微調整する「一次電圧制御盤」で速度制御を行っています。速度検出は「指速発電機(タコジェネレータ)」で回転速度を直流電圧として検出する仕組みとなっています。
「二次抵抗制御+一次電圧制御」について制御の方法を詳しく知りたいかたは以下記事を参照ください
誘導機の二次抵抗を用いた制御(渦流制御と一次電圧制御)正回転編 /絵と波形でわかる誘導機の仕組み/もしも目指すなら (mazasunara.com)
誘導機の二次抵抗を用いた制御(渦流制御と一次電圧制御)逆回転編(制動制御) /絵と波形でわかる誘導機の仕組み /もしも目指すなら (mazasunara.com)
「二次抵抗制御+一次電圧制御」の特徴としては以下があげられます。
・比例推移の特徴として始動トルクは大きく得られる
・減速制御は、相回転方向を逆転させて滑りによる調整で行われる
⇒減速の制約がない
・電源の直接投入なので初動が早い
・速度検出がアナログ値であるため、回転数速度制御の精度はやや低い
・比例推移に使用する二次抵抗器は電流が多く流れる
⇒二次抵抗器は大型化しやすい
・誘導モータと比較して巻線モータは、回転子に巻線されているため、やや大きい
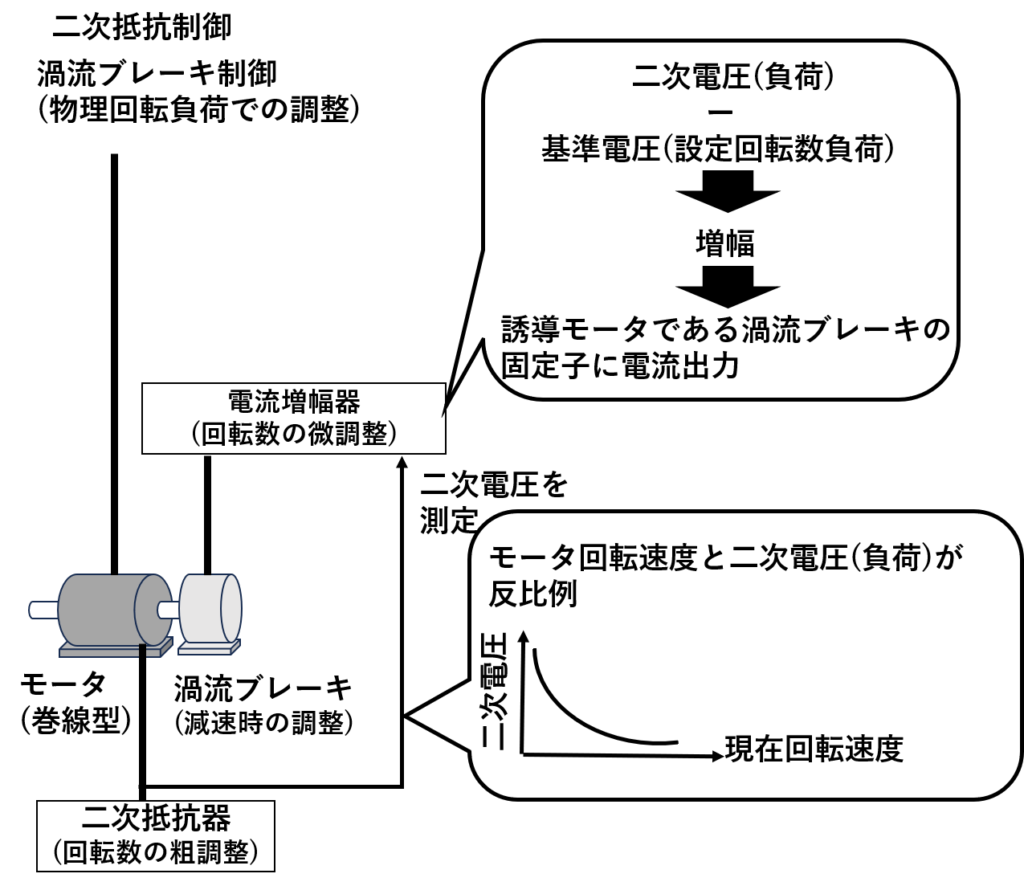
二次抵抗制御+渦流ブレーキ制御
比例推移によって回転数を幅広に制御するための「二次抵抗器」、誘導モータに直流電流を流し、物理的な外部負荷として回転数を微調整する「渦流ブレーキ」で速度制御を行っています。速度検出はモーターの二次電圧(負荷量によって発生)で負荷(目標との速度差)を直流電圧として検出する仕組みとなっています。
「二次抵抗制御+渦流ブレーキ制御」の特徴としては以下があげられます。
・速度制御は、渦流ブレーキによる物理負荷を与えて滑りによる調整で行われる
⇒回転数速度制御の精度が低い
・速度検出がモータの二次電圧(負荷量)であるため、回転数速度制御の精度は低い
・渦流ブレーキはモータの大量の運動エネルギーを吸収する役割にある
⇒減速トルクは渦流ブレーキの性能(サイズ)に依存、使用頻度に制約がある
以下は「二次抵抗制御+一次電圧制御」と同様です
・比例推移の特徴として始動トルクは大きく得られる
・電源の直接投入なので初動が早い
・比例推移に使用する二次抵抗器は電流が多く流れる
⇒二次抵抗器は大型化しやすい
・誘導モータと比較して巻線モータは、回転子に巻線されているため、やや大きい
相対的な比較を行うと以下のようになります


コメント